

Octopus产品系列成员之一。用于扩展串口的数量。
OCTOPUS系列产品简介
1. 什么是OCTOPUS系列产品
随着自动化应用水平的提高,越来越多的自动化设备使用步进电机进行控制,特别在医疗设备等领域,电流在2安培以下的步进电机的被大量使用,并且在一台设备中使用动辄十几多则几十只步进电机的情形多有发生。如何选择一种合理的架构,简单而有效地控制这些电机的工作,成为一个成功的系统设计方案所必须考虑的问题。
目前市场上步进电机驱动的最常用方式是一个驱动器驱动一个步进电机,其步进脉冲和转动方向由外部提供,其细分数和电流设置通过拨码开关来完成,其结构如图1.1所示。

图1.1
这种方式的缺点如下:1.由于一个驱动器驱动一个电机,集成度低,体积比较庞大;2.用户控制板对于每一个驱动器提供驱动控制,每一个驱动器至少需要用户控制板提供两个I/O口来控制,当电机数较多时,用户控制板的负荷显著增加;3.实现电机的多点控制较为困难(即使不是不可能的话);4.用户控制板和每个驱动器都有连线,使得用户控制板成为连线的中心,从某种程度上制约了驱动器的摆放位置,也使得线缆过多过长,增加了成本,降低了系统可靠性;5.由于所有的功能必须由开发者自己完成,所以开发周期长,开发成本高。
OCTOPUS系列产品使用一种全新的架构技术(称为OCTOPUS网络架构,该技术正在专利申请中)来实现步进电机相关的应用(但不限于步进电机相关的应用)。其结构如图1.2所示。
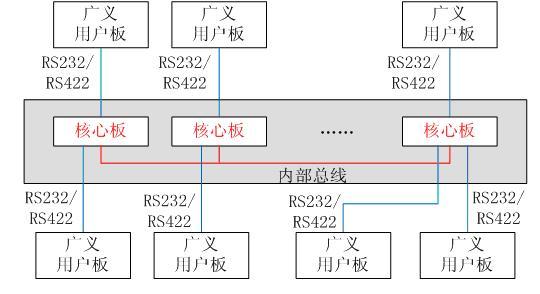
图1.2 OCTOPUS网络架构
图1.2中的核心板正是本文要介绍的OCTOPUS系列产品所包含的主要内容之一。那么核心板(KERNEL BOARDS)和用户板(CUSTOM BOARDS)以及广义用户板(GENERAL CUSTOM BOARDS)的定义是什么呢?一个非常贴切的比喻来自机械制造行业的术语:核心板相当于标准件,而用户板相当于非标件。和标准件相仿,核心板是在工厂预制的,满足特定功能的PCB板;其特征在于,每块核心板实现自己特定的功能,譬如用于驱动电机,或用于驱动继电器,或同时接受传感器信息;每块核心板由唯一的ID来标识;每块核心板都有一个或多个RS232/RS422通信口,可用来连接广义用户板;核心板和核心板之间通过高速内部总线相连接,构成一个核心子系统。用户板是一个完整系统中用来实现用户自定义功能、或作为系统主控的PCB板。广义用户板则包括用户板、上位机以及其它担当某个功能的电脑(运行特定软件,譬如MyOctopus软件),所有的广义用户板构成了外围子系统。核心子系统和外围子系统构成一个完整的应用系统。广义用户板通过任意一个RS232/RS422通信口,与所有的核心板进行通信,间接地控制核心板完成相应的功能;同时,广义用户板还可以通过同一个RS232/RS422通信口与其它的广义用户板进行通信(当然用户可以选择在用户板和用户板之间架设其它的通信链路)。所有的广义用户板在系统中处于相同的地位,因此,构成的系统是一个完备的多主系统,具有极其优秀的实时响应能力。
目前可提供三类核心板:1.多路步进电机驱动板(简称电机驱动板);2.通用输入输出板(简称IO板);3.通信扩展板(简称扩展板)。在不远的将来,将根据用户的应用需求,推出更多的类别和型号。当然,它们都毫不例外地统一在OCTOPUS网络框架之下。
除了上面提到的核心板以外,OCTOPUS系列产品的另一个重要内容是MyOctopus软件,这是为OCTOPUS网络架构量身定做的,它可以对每块核心板进行参数设定,可以实时操作核心板上的功能部件(譬如电机驱动或继电器操作),可以通过内含的prototype Builder脚本语言在几分钟之内构造一个完全可并发运行的、解释执行的用户程序,让你的应用系统“真实地”动起来,而不是“仿真”运行。
2. OCTOPUS系列产品的特点
OCTOPUS网络架构具有如下突出优点:
l 物理结构简洁,相比传统形式线缆大幅度减少;
l 分布式结构,核心板可以和相关的外设以及用户板放置在一起,而核心板之间距离可以相对很远,之间用高速内部总线连接;
l 可堆叠,所有核心板具有兼容的安装孔位,从而节省安装空间
l 理想的多主结构,本质上适合于多点控制,相对于传统485的单主方式,具有质的飞跃;
l 精心设计的控制命令集,用户可以使用该控制命令集编写上位机控制软件或用户板控制软件;
l MyOctopus软件提供了产品开发的极好的辅助调试手段,通过软件所含的“原型构造器”可以用通过“PrototypeBuilder脚本”方式方便地构造和改变原型系统,提前验证机械配合是否良好,尽早发现潜在问题;
l 支持利用内部总线提供用户板和用户板之间的小数据量通信;
l 独特的速停触发机制,加快电机控制响应速度;
l 采用OCTOPUS网络架构进行开发,大大减少了产品开发的工作量,大大缩短了产品开发周期。用户唯一要考虑的就是实现应用逻辑和核心板不支持的其它特殊功能而已;
3. 使用OCTOPUS系列产品的步骤
1. 根据目标系统所要支持的步进电机数量(目前仅支持2A以下步进电机,2A以上的步进电机要单独处理)以及它们的物理位置确定需要的多路步进电机驱动板的数量;
2. 根据继电器输出的负载的数量及物理位置确定需要的通用输入输出板的数量;
3. 根据所要连接用户板的数量确定是否需要使用通信扩展板;
4. 根据用户板与相关核心板的距离确定是使用RS232还是RS442接口;保险起见,一般两者距离超过3米可以考虑使用RS422接口;较短距离使用RS232接口;两者在软件协议上是完全一致的。如果要将电脑和RS422接口相连,可以考虑使用一个USB-RS422转接器(本公司可提供)即可,该转接器模拟了一个串口;
5. 根据所要构建的目标系统,为每一个电机、传感器和继电器负载命名,譬如电机命名为MA,MB,...;传感器命名为SA,SB,...;阀命名为VA,VB,...;泵命名为PA,PB...;你完全可以用你自己的方式命名;
6. 建立一张配置表,内容包括每块核心板的ID;对于步进电机驱动板来说,每一个驱动通道对应的电机名(上述的MA,MB...)细分数和电流值,对于通用输入输出板来说,每个驱动通道对应的负载(如上述的VA,VB ,PA,PB...);每块核心板的传感器通道所对应的传感器(入上述的SA,SB,...);
7. 根据说明自行制作或由本公司代为定制给定长度的两线内部总线,通过内部总线将所有的核心板按任意次序连接起来,在总线的两端插上本公司提供的终结器;不要插任何负载;
8. 将一台运行MyOctopus软件的电脑的串口(或USB转232转接器或USB转422转接器)连接到其中任意一块核心板的RS232(或RS422)通信口;
9. 为每块核心板插上合适的控制电源和驱动电源,并上电;
10. 运行MyOctopus软件为每块核心板设定ID,可以根据配置表为每个步进电机驱动板的每个通道设置正确的细分和电流值,也可以先统一设置一个较小的电流值(譬如0.1A),以后再修改;切忌设置一个大的电流值而连接了一个小电流电机,这会导致电机剧烈发热直至烧毁,并有可能烧毁驱动板;
11. 切断所有控制和驱动电源,连接电机、负载和传感器;然后再上电;
12. 可以在MyOctopus软件中看到你的目标系统的实时情况,你可以通过手动方式操作电机和继电器的状态,实时看到传感器的状态改变;
13. 如果一切正常,就可以开始编写PrototypeBuilder脚本了,这是个很简单、但功能强大,可选择运行,可跟踪的多线程脚本,可以让你的目标系统并发运行,而做到这一点只要花几分钟编写一些简单的一些脚本语句就搞定了;
14. 系统正常了,你可以用OCTOPUS产品提供的命令集设计你自己的上位机系统和用户板了;而此时,先前的PrototypeBuilder脚本就是你的逻辑蓝本;
4. 产品选型
型号 | 说明 | ||||||||||||||
OCT@MD-A2-C4-S8-D8 | 4路步进电机控制,RS232接口 | ||||||||||||||
OCT@MD-A2-C4-S8-D8-422 | 4路步进电机控制,RS422接口 | ||||||||||||||
OCT@IO-R8-S8 | 通用8路输出/8路输入板,RS232接口 | ||||||||||||||
OCT@IO-R8-S8-422 | 通用8路输出/8路输入板,RS422接口 | ||||||||||||||
OCT@IO-S20 | 通用20路输入板,RS232接口 | ||||||||||||||
OCT@IO-S20-422 | 通用20 OCTOPUS系列产品简介 1. 什么是OCTOPUS系列产品 随着自动化应用水平的提高,越来越多的自动化设备使用步进电机进行控制,特别在医疗设备等领域,电流在2安培以下的步进电机的被大量使用,并且在一台设备中使用动辄十几多则几十只步进电机的情形多有发生。如何选择一种合理的架构,简单而有效地控制这些电机的工作,成为一个成功的系统设计方案所必须考虑的问题。 目前市场上步进电机驱动的最常用方式是一个驱动器驱动一个步进电机,其步进脉冲和转动方向由外部提供,其细分数和电流设置通过拨码开关来完成,其结构如图1.1所示。 图1.1 这种方式的缺点如下:1.由于一个驱动器驱动一个电机,集成度低,体积比较庞大;2.用户控制板对于每一个驱动器提供驱动控制,每一个驱动器至少需要用户控制板提供两个I/O口来控制,当电机数较多时,用户控制板的负荷显著增加;3.实现电机的多点控制较为困难(即使不是不可能的话);4.用户控制板和每个驱动器都有连线,使得用户控制板成为连线的中心,从某种程度上制约了驱动器的摆放位置,也使得线缆过多过长,增加了成本,降低了系统可靠性;5.由于所有的功能必须由开发者自己完成,所以开发周期长,开发成本高。 OCTOPUS系列产品使用一种全新的架构技术(称为OCTOPUS网络架构,该技术正在专利申请中)来实现步进电机相关的应用(但不限于步进电机相关的应用)。其结构如图1.2所示。 图1.2 OCTOPUS网络架构 图1.2中的核心板正是本文要介绍的OCTOPUS系列产品所包含的主要内容之一。那么核心板(KERNEL BOARDS)和用户板(CUSTOM BOARDS)以及广义用户板(GENERAL CUSTOM BOARDS)的定义是什么呢?一个非常贴切的比喻来自机械制造行业的术语:核心板相当于标准件,而用户板相当于非标件。和标准件相仿,核心板是在工厂预制的,满足特定功能的PCB板;其特征在于,每块核心板实现自己特定的功能,譬如用于驱动电机,或用于驱动继电器,或同时接受传感器信息;每块核心板由唯一的ID来标识;每块核心板都有一个或多个RS232/RS422通信口,可用来连接广义用户板;核心板和核心板之间通过高速内部总线相连接,构成一个核心子系统。用户板是一个完整系统中用来实现用户自定义功能、或作为系统主控的PCB板。广义用户板则包括用户板、上位机以及其它担当某个功能的电脑(运行特定软件,譬如MyOctopus软件),所有的广义用户板构成了外围子系统。核心子系统和外围子系统构成一个完整的应用系统。广义用户板通过任意一个RS232/RS422通信口,与所有的核心板进行通信,间接地控制核心板完成相应的功能;同时,广义用户板还可以通过同一个RS232/RS422通信口与其它的广义用户板进行通信(当然用户可以选择在用户板和用户板之间架设其它的通信链路)。所有的广义用户板在系统中处于相同的地位,因此,构成的系统是一个完备的多主系统,具有极其优秀的实时响应能力。 目前可提供三类核心板:1.多路步进电机驱动板(简称电机驱动板);2.通用输入输出板(简称IO板);3.通信扩展板(简称扩展板)。在不远的将来,将根据用户的应用需求,推出更多的类别和型号。当然,它们都毫不例外地统一在OCTOPUS网络框架之下。 除了上面提到的核心板以外,OCTOPUS系列产品的另一个重要内容是MyOctopus软件,这是为OCTOPUS网络架构量身定做的,它可以对每块核心板进行参数设定,可以实时操作核心板上的功能部件(譬如电机驱动或继电器操作),可以通过内含的prototype Builder脚本语言在几分钟之内构造一个完全可并发运行的、解释执行的用户程序,让你的应用系统“真实地”动起来,而不是“仿真”运行。 2. OCTOPUS系列产品的特点 OCTOPUS网络架构具有如下突出优点: l 物理结构简洁,相比传统形式线缆大幅度减少; l 分布式结构,核心板可以和相关的外设以及用户板放置在一起,而核心板之间距离可以相对很远,之间用高速内部总线连接; l 可堆叠,所有核心板具有兼容的安装孔位,从而节省安装空间 l 理想的多主结构,本质上适合于多点控制,相对于传统485的单主方式,具有质的飞跃; l 精心设计的控制命令集,用户可以使用该控制命令集编写上位机控制软件或用户板控制软件; l MyOctopus软件提供了产品开发的极好的辅助调试手段,通过软件所含的“原型构造器”可以用通过“PrototypeBuilder脚本”方式方便地构造和改变原型系统,提前验证机械配合是否良好,尽早发现潜在问题; l 支持利用内部总线提供用户板和用户板之间的小数据量通信; l 独特的速停触发机制,加快电机控制响应速度; l 采用OCTOPUS网络架构进行开发,大大减少了产品开发的工作量,大大缩短了产品开发周期。用户唯一要考虑的就是实现应用逻辑和核心板不支持的其它特殊功能而已; 3. 使用OCTOPUS系列产品的步骤 1. 根据目标系统所要支持的步进电机数量(目前仅支持2A以下步进电机,2A以上的步进电机要单独处理)以及它们的物理位置确定需要的多路步进电机驱动板的数量; 2. 根据继电器输出的负载的数量及物理位置确定需要的通用输入输出板的数量; 3. 根据所要连接用户板的数量确定是否需要使用通信扩展板; 4. 根据用户板与相关核心板的距离确定是使用RS232还是RS442接口;保险起见,一般两者距离超过3米可以考虑使用RS422接口;较短距离使用RS232接口;两者在软件协议上是完全一致的。如果要将电脑和RS422接口相连,可以考虑使用一个USB-RS422转接器(本公司可提供)即可,该转接器模拟了一个串口; 5. 根据所要构建的目标系统,为每一个电机、传感器和继电器负载命名,譬如电机命名为MA,MB,...;传感器命名为SA,SB,...;阀命名为VA,VB,...;泵命名为PA,PB...;你完全可以用你自己的方式命名; 6. 建立一张配置表,内容包括每块核心板的ID;对于步进电机驱动板来说,每一个驱动通道对应的电机名(上述的MA,MB...)细分数和电流值,对于通用输入输出板来说,每个驱动通道对应的负载(如上述的VA,VB ,PA,PB...);每块核心板的传感器通道所对应的传感器(入上述的SA,SB,...); 7. 根据说明自行制作或由本公司代为定制给定长度的两线内部总线,通过内部总线将所有的核心板按任意次序连接起来,在总线的两端插上本公司提供的终结器;不要插任何负载; 8. 将一台运行MyOctopus软件的电脑的串口(或USB转232转接器或USB转422转接器)连接到其中任意一块核心板的RS232(或RS422)通信口; 9. 为每块核心板插上合适的控制电源和驱动电源,并上电; 10. 运行MyOctopus软件为每块核心板设定ID,可以根据配置表为每个步进电机驱动板的每个通道设置正确的细分和电流值,也可以先统一设置一个较小的电流值(譬如0.1A),以后再修改;切忌设置一个大的电流值而连接了一个小电流电机,这会导致电机剧烈发热直至烧毁,并有可能烧毁驱动板; 11. 切断所有控制和驱动电源,连接电机、负载和传感器;然后再上电; 12. 可以在MyOctopus软件中看到你的目标系统的实时情况,你可以通过手动方式操作电机和继电器的状态,实时看到传感器的状态改变; 13. 如果一切正常,就可以开始编写PrototypeBuilder脚本了,这是个很简单、但功能强大,可选择运行,可跟踪的多线程脚本,可以让你的目标系统并发运行,而做到这一点只要花几分钟编写一些简单的一些脚本语句就搞定了; 14. 系统正常了,你可以用OCTOPUS产品提供的命令集设计你自己的上位机系统和用户板了;而此时,先前的PrototypeBuilder脚本就是你的逻辑蓝本; 4. 产品选型 型号 说明 OCT@MD-A2-C4-S8-D8 4路步进电机控制,RS232接口 OCT@MD-A2-C4-S8-D8-422 4路步进电机控制,RS422接口 OCT@IO-R8-S8 通用8路输出/8路输入板,RS232接口 OCT@IO-R8-S8-422 通用8路输出/8路输入板,RS422接口 OCT@IO-S20 通用20路输入板,RS232接口 OCT@IO-S20-422 通用20 |



